

Product Introduction :
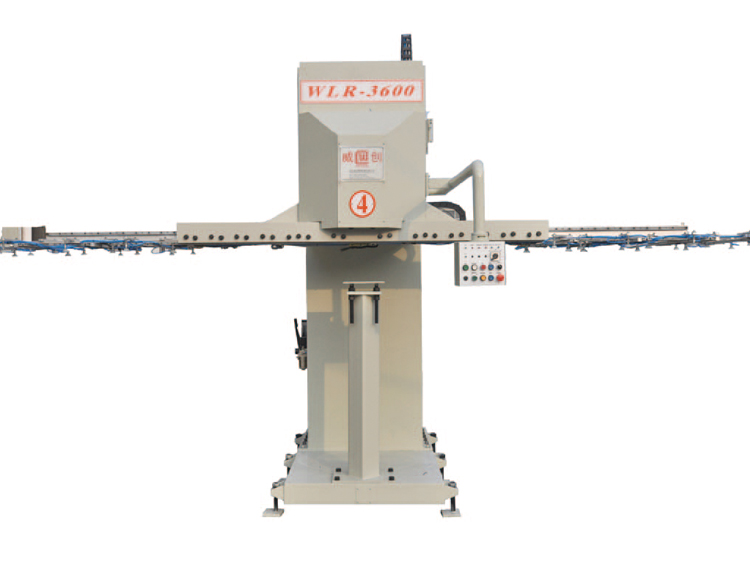
A type of automatic handling device, used for connected multiple punch presses, multi-process punching toolings, and large-scale sheet metal parts.
This type of automatic feeding and transferring equipment is specially developed and manufactured for connected production of multiple punch presses in the punching industry, to realize the transferring of precise positioning and continuous automatic operation. Adopting high-performance Japanese Mitsubishi servo motor drive, by means of diversified reclaiming methods such as precise transmission mechanism matched with vacuum chuck, electromagnet or pneumatic gripping jaw etc. We provide the customers with stable and reliable equipments which can operate 24H all-day, so as to achieve the target of shortening production rhythm and enhancing productivity, enhancing customers in the industry with strong technical support and competitive advantages.
■ Driving mechanism
The forwarding stroke is driven by imported gear wheels, and guided by precisely-sloped steel rails and guide-wheel sets. The lifting mechanism adopts the ways of servomotor and ball screw, under the auxiliary guidance of double balancing cylinders.
■ High-efficiency AC servo system
High-performance motion control system and in-built braking servomotor are adopted for forwarding, to meet the requirement of high-performance operation, which is able to timely stop the moving partings at the occurrence of unpredictable power-cut or overload, to realize highly-safe working environment.
■ Control
Various driving values have been preset and in-built in the controller, and all the other operation programs & modes, and workpiece error-transfer monitoring system etc. are stored in the PLC. The system has the functions of error-transfer and short-of-material etc., and screen display is available at the occurrence of abnormalities.
■ Expansibility
The equipment can be used while connected to NC feeder, double-charging/ single-charging material rack, and multi-axis tapping machine, thus realizing full automatic operation.
Functional Features:
1、 This type of manipulator adopts the drive with double-servomotor, the double gripping arms are suspended under the main bar, and synchronous motion of X-axis and Z-axis, thus enhancing the automaticity.
2、The gripping arm is made of aluminum profile, machined with bar-type groove, and the arm size is adjustable according to the size of workpiece, all of which are quick-dismantling type;
3、For material gripping, multiple modes can be adopted to grip, such as vacuum chuck, electromagnet or vacuum gripping jaw etc. (single or in combination)
4、The rear section is equipped with safety measures such as safety shelf and acousto-optics alarm device etc.
5、Sensor detection device (proximity sensor and vacuum detection) is installed at each arm of the manipulator.
6、The production line can have the function of side frame, which is more suitable for special technological requirements in the process of punching.
7、Auxiliary equipments such as coil feeder and tablet material rack, as well as auxiliary equipments such as tapping machine, turnover machine, and rivet-placing machine can be added, to realize connected production;
Specification:
Model | WLDR series |
Drive mode | Full-servo |
Operation mode | Central operating platform (touch screen) |
X-axis stroke (left-right forwarding) | 4000 (customizable) |
Z-axis stroke (lifting) | 150mm (customizable) |
Feeding precision | ±0.20mm |
Max. gripping weight | 15kg |
Gripping detection | Proximity sensor and vacuum detection |
Gripping mode | Vacuum-absorption, electromagnet, and gripping jaw |
External power requirement | 3P AC380V |
Operation rhythm | Max: 12 times/ min (In accordance with specific line configuration) |

