



2016/7/8 14:15:04 人气(25375)
 |

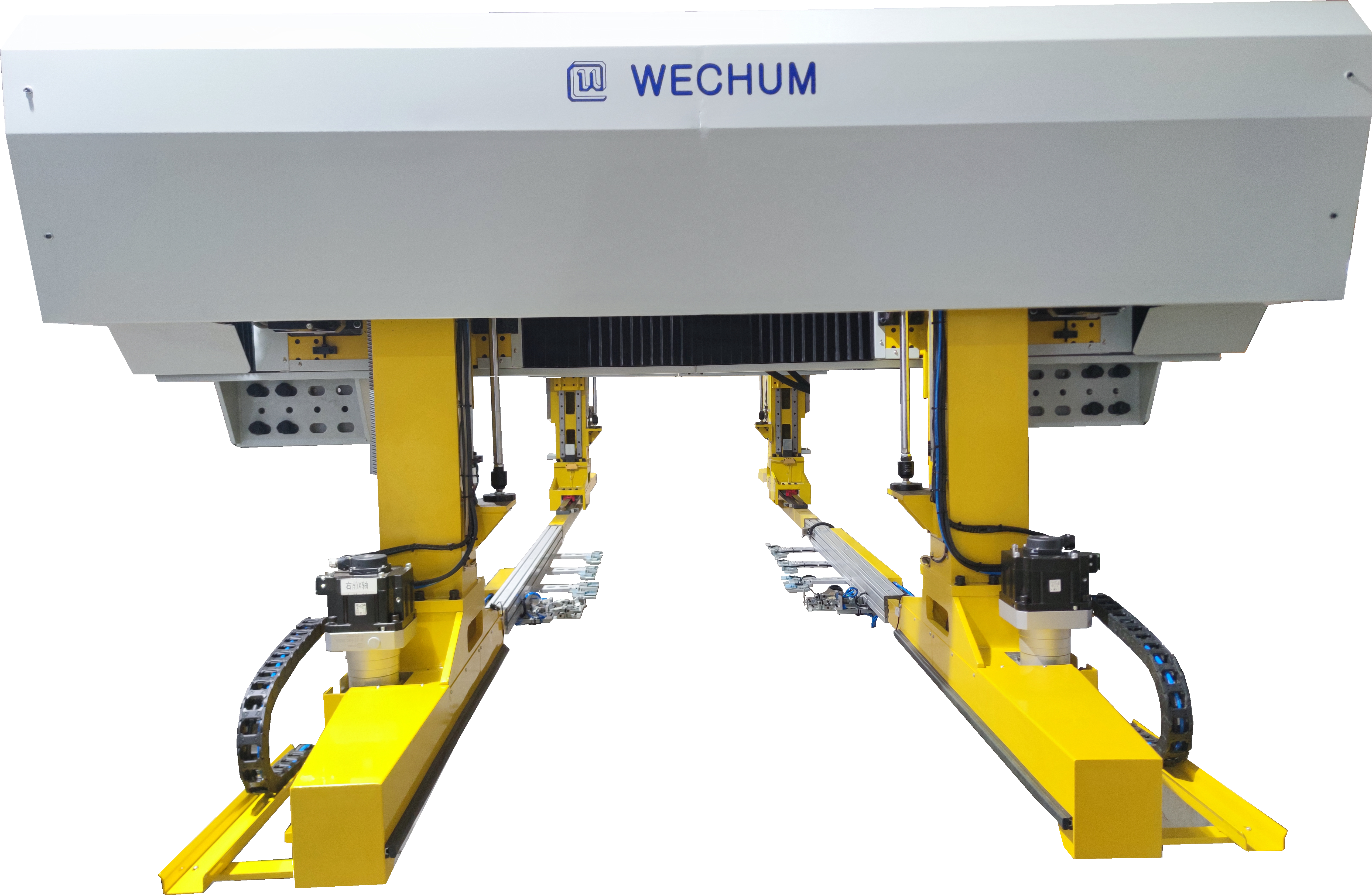
1、采用多伺服马达驱动、夹料手臂悬挂与双主Bar、辅机相辅助传动实现可以在各工位间的循环传递工件,臂间距离和工位距离相等,取料手臂同步地沿把工件从一个工位移动到下一个工位,提高自动化程度;
2、举升运转采用滚珠丝杆驱动,并设置平衡气缸平衡机件重量,降低电机所须功率及电力消耗。举升传动系统并配备有刹车装置,于关机停电停气状态时能维持关机前之高度位置不下落。冲床曲轴角度输出轴端连接一个绝对值式编码器,所有前送(X轴)、闭合(Y轴)、举升(Z轴)三轴向伺服电机接追随此编码器讯号实现与冲床同步运转;
3、具备相应的电动注油系统,黄油润滑系统提供主传动、导轨润滑等用油;
4、每个抓取料臂固定于平行的主Bar移送杆,主Bar由机械手本体(X轴驱动单元)驱动作左右移送,另由Z轴驱动单元驱动作上下垂直举升并通过Y轴驱动单元驱动主Bar作Y向夹料(内移夹紧、外移放松)动作,实现同步机械手做3D运行动作。机械手的各轴均可依照客户的工艺要求进行调整(在人机界面中进行参数输入、更改);
5、机械手每个手臂上都装有传感器检测装置(近接式传感器);
6、线体可追加卷式送料机、片料积料架等辅助设备实现连线生产;

规格Specification:
型号 | W3DMR系列 |
驱动方式 | 全伺服 |
操作方式 | 中央操作平台(触摸屏) |
X轴行程(左右前移) | 100-1500mm(可定制) |
Y轴行程(夹持) | 100-500mm(可定制) |
Z轴行程(举升) | 100-500mm(可定制) |
送料精度 | ±0.20mm |
最大抓取重量 | 10kg |
吸料检知 | 近接式传感器、真空检知 |
夹取料方式 | V型夹爪、弧形夹爪 |
外部电源需求 | 3P AC380V |
运行节拍 | Max:15~30次/min(具体视线体配置) |